热词搜索:北斗 | GNSS | 卫星导航 | 科普 | 小卫星
任何一种技术手段都有其局限性,GNSS的脆弱性就是具体实例,解决办法是多系统的融合,包括如下技术:
1)无处不在的照相机。现在便宜的数字照相机已经十分普及。照相机在导航中至少有三种不同的方式加以运用。一是作为系列存储图像以确定照相机视点;二是识别图像独特的特征,细化完善定位数据;三是作为视觉里程计,形成航向推算能力。
2)微型传感器、雷达。数十年来的研究,速度计、陀螺仪和时钟解决了小型、轻便、低价位、低功耗等问题,业已取得显着进步。同样,雷达系统用于自主陆地车辆的防碰撞,已经成为普通汽车的标准导航配置。
3)多模GNSS信号与系统。即使四个卫星星座的使用,也有地方无法同时收到四颗卫星的视距信号,如城市峡谷,或者室内情况。在GNSS现代化过程中,不断改进干扰缓解技术,更多地采用组合信号、矢量跟踪和捕获技术,利用更多的卫星和信号。
4)通信与定位算法。过去十年来,导航技术的最大创新是将通信信号用于定位目的。新的通信标准也伴有定位技术,下一波基于通信的定位系统,可能是在第五代移动通信、蓝牙低功耗,以及铱星这样的通信卫星。
5)3D(地)图形。汽车导航应用的数字地图,是在上个世纪90年代开始的,而飞机用的地面参考导航(TRN),使用的是地面高度信息,来得更早。如今在具有挑战性的城市区域,3D城市图形可能是最有革命性的定位技术。
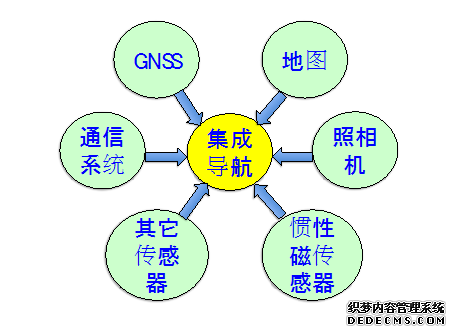
6)多传感器导航拼图。历史上,所谓的集成导航,通常意味着两个系统的组合,如GNSS与惯性导航,偶然也会是三个系统,如GNSS、里程计和(地)图形匹配。但是现在这里所说的将来的集成系统,可能是许多个组成部分构成的。
7)场景信号。场景可以给导航解决方案以附加信息,例如,汽车保持在公路上,从定位解决方案而言,可以能够有效地消除一个维度。它们的轮子也强制约束在它们可能运动的路上,减少了要求测量它们运动的惯性传感器数量。
8)机会导航。机会导航要求采用周围环境中已经有的信息,用来得到最有可能的定位解决方案。无线电机会信(SOOP),是将原先非导航目的的信号加以利用,也不需要操作者间的协调,包括来自于网络的电话信号,附近建筑物中泄漏出来的WiFi信号,以及电视和无线电广播信号。
9)协同定位。协同定位,或者肩并肩定位,是一组用户工作在一起确定它们的位置,协同的概念是数据分享和相对定位。
10)完好性。由于技术业已成熟,用户希望更高的可靠性。这就是说,更加可靠的技术,对于安全关键和使命关键应用是可以实现的,是真实可信的。
 环球新时空
环球新时空 斗室智库
斗室智库